Currently, commercially available power wheelchairs may not be affordable to low income families especially in developing countries. Moreover, these don't have computers and sensors on-board to enable smart safety to aid navigation. The UC San Diego SmartWheelchair Lab will deliver an affordable modular design that can be replicated around the world and used as a testbed for future development in healthcare safety for patients that require the use of wheelchairs.
We are a team of undergraduate students with a goal of designing a smart wheelchair that can change the lives of many people who struggle with permanent debilitating diseases that cause a loss of mobility and motor control. This research is lead by Ph. D. Jack Silberman, an engineering lecturer at UC San Diego with over 20 years of industry experience in medtech, robotics, and biotech.
 |
 |
 |
|---|---|---|

Current Work
 |
User ResearchOur User Research team has been working hard to push for a user centered design and functionality. They have worked with around 70 wheelchair users and experts to improve the project's implementation. This year they were present at CHI 2019 to present their work and compete in the Student Research Competition, making it to the final round and placing third. If you are interested in participating as a user in our studies, please get in contact with Isabella at ilgomezt@ucsd.edu. Check out our accepted CHI submission! |
||||||||
|---|---|---|---|---|---|---|---|---|---|
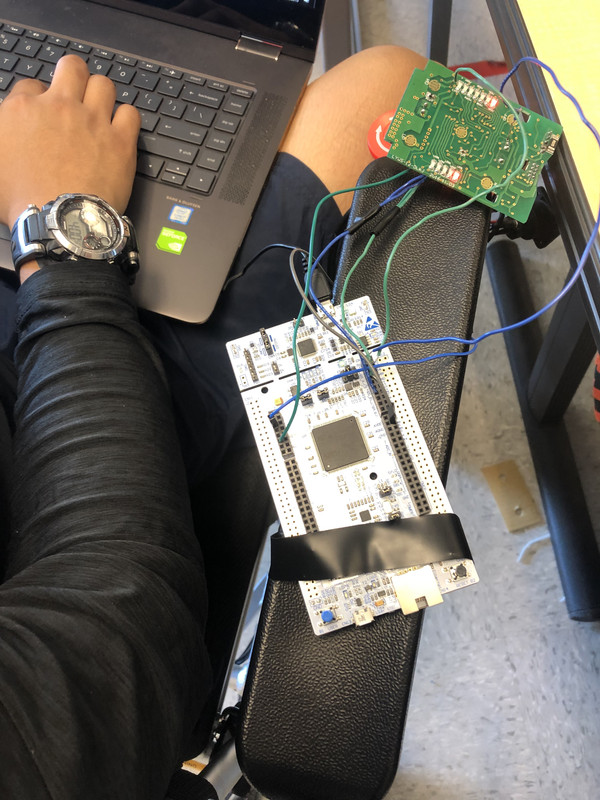
Embedded SystemsDealing with sensors, microcontrollers, PID, PCBs, and piles of code is only the surface of the Embedded Systems team’s responsibilities. Some of the Embedded Systems team’s goals are: safety for the user, implementing the use of the wheelchair joystick, optimizing our code, and implementing backwards facing ToF sensors. If you would like to join the team or would like more information, contact Jesus at jvfausto@ucsd.edu. Take a look at some code on our Github! |
 |
||||||||
 |
NavigationOur Navigation team is the head behind the full autonomy of our wheelchair design. They take control of the obstacle detection and path planning . This team uses ROS, SLAM, Amazon Alexa, and depth perception cameras to accomplish their difficult tasks. If you are feeling up to the challenge of joining our Navigation team please contact us at our team’s email address: smartwheelchair@eng.ucsd.edu. Take a look at some code on our Github! |
||||||||
PrototypeThe Prototype team is paramount to the success of the SmartWheelchair project. Using SolidWorks, our small Prototype team has created all the sensor mounts on our wheelchair and even some pieces for user protection. This summer the Prototype team has and is working on mounts for backwards facing ToF sensors, emergency button hold, updated encoder mounts, and more! To join our Prototype team please email smartwheelchair@eng.ucsd.edu. |
 |
||||||||
Principle Investigator
 |
Jack SilbermanJack Silberman has over 20 years of experience in automation and robotics. He started working in robotics while pursuing his B.S. in Electrical Engineering. Dr. Silberman did robotics post graduate work in England and holds a masters degree from PUC-Rio in Mechanical Engineering and a Ph.D. from Carnegie Mellon University where his research was on mobile field robotics reliability. Dr. Silberman has worked in educational robotics, NASA sponsored mobile field robotics, semiconductor automation, biotech and medical devices. Currently, Dr. Silberman is the commercial QA area manager for Canada and Latin America with Abbott Diabetes Care (ADC), and a lecturer at UC San Diego in Mechanical and Aerospace Engineering. |
|---|
 |
Deborah ForsterResearch SpecialistTrained in behavioral ecology and cognitive science, Forster is currently a research specialist in the Contextual Robotics Institute and affiliated faculty in the Design Lab at UC San Diego. Having studied social complexity and distributed cognition in wild baboons, Forster then extended her professional engagements in the contexts of automotive design, architecture education, and art-science collaborations. Returning to UCSD and completing her PhD in cognitive science in 2012, Forster is typically embedded within engineering / computation / design-centered research efforts that also tracks behavior in complex socio-technical systems. From kid-friendly robots (RUBI) to automated pain detection in humans and other mammals (horses, dogs, monkeys and rats), Forster supports the development of interdisciplinary research networks (today’s ‘convergence science’) and continues to forge creative connections with art and design in both academia and industry. |
|---|
Current Members
 |
Sayan Mondal, B.Sc.Sayan Mondal is a 2nd year graduate student in Mechanical and Aerospace Engineering department, with a specialization in Dynamics and Controls. He is the Teaching Assistant of MAE/ECE 148 - Introduction to Autonomous Vehicles. He is a controls and motion planning researcher in Contextual Robotics Institute, UC San Diego. His research interests are in Computer Vision and in Controls. Also, he is involved in robots design and fabrication. He is a member of IEEE-Eta Kappa Nu (IEEE-HKN), the Engineering Honor Society. In future, he wants to build his career as an Autonomous Vehicle Engineer. Fun fact, he is also good in sports and is always down to play soccer! |
|---|---|
 |
Yinglong Miao, B.Sc.Yinglong Miao is a first-year Computer Science Master student at UCSD. He obtained BSc. in Computer Science at the Chinese University of Hong Kong. He is interested in applications of optimization and neural networks in Robotics, especially in Motion Planning and control. He also has research interests in Computer Vision. Previously he has participated in theoretical research about graph theory and computational complexity in the Chinese University of Hong Kong. He is generally interested in Mathematics and Physics, and has passion for understanding the world. |
 |
Jesus FaustoJesus Fausto is a second year UCSD student pursuing a B.S. in Electrical Engineering. His current robotics experience comes from working with his high school robotics team. He is ready to learn and help the SmartWheelchair project over a long period of time. |
 |
Jesi MirandaJesi Miranda is a 2nd year UCSD student pursuing a bachelor's degree in electrical engineering. His interests are in power systems, autonomous navigation and machine learning. Jesi’s future plans are to integrate his skills to major projects for the benefit of the public and pursue a master's degree. |
 |
Gaurav ParmarGaurav Parmar is a 3rd year undergraduate student pursuing a degree in Computer Science. In the past he has been the software team lead for Colossus, a static fire rocket engine test stand being built by SEDS. He is interested in robotics and machine learning and excited to augment his skillset. |
 |
Isabella Gomez TorresIsabella is a 2nd year undergraduate student pursuing a B.S. in Electrical Engineering at UCSD. Currently Isabella works with low-level sensors and leads the team’s User Research progress. This is her second year working for the SmartWheelchair project and she is excited to continue. |
 |
Tanish JainTanish is a third-year undergraduate pursuing a degree in Electrical Engineering. He is currently pursuing coursework in Machine Learning & Controls, and is deeply interested in robotics, having worked on several robotics projects over the years. He is passionate about working on technologies which can bring positive, tangible transformation in people’s lives. |
 |
Michael LiMichael is a 4th year in electrical engineering, with a depth of circuits and systems. He loves building and prototyping systems, having built an IoT alcohol gel dispenser and a wifi controlled lighting system. He’s excited to work on the smart wheelchair project and hopes his contributions will significantly help the project reach its goal. He hopes one day he will be a master at designing both digital and analog circuits. Fun fact, he also loves cooking tasty food for himself in his free time. |
 |
Stephen DuanStephen Duan is a second-year undergraduate student at UC San Diego majoring in Electrical Engineering with a depth in machine learning and a minor in Cognitive Science. Before joining the SmartWheelchair Project, he was the team lead of IEEE quarterly project and a member of the IEEE Quadcopter annual project. Stephen is passionate about the application of machine learning and computer vision, and is always excited to learn new skills. |
 |
Richard ToRichard To is a second-year UCSD undergraduate student pursuing a degree in Computer Engineering. He has a passion for computer vision and the implementation of this technology into the SmartWheelchair for navigation. He is a sub-team lead for the navigation team in the SmartWheelchair project working with autonomous navigation. Richard is enthusiastic to be able to work and provide his skill set towards the project. |
 |
Evan SerranoEvan Serrano is a 1st year undergraduate student at the University of California, San Diego. He is currently pursuing a Bachelor of Science degree in Computer Engineering, with a minor in Mathematics. He began programming in High School and has developed a passion for Software Engineering. He has interests in Artificial Intelligence, Machine Learning and Robotics and is excited to help work on the SmartWheelchair Project. |
 |
Fernando LopezFernando Lopez is a junior Electrical Engineering student at University of California San Diego. His main interests are aerospace and robotics. Before getting involved in the Open Sourced Smart Wheelchair project, he has been working on the Colossus Static Fire Test Stand project from SEDS UCSD. He has also worked as a pinsetter technician and participated in robotics competition during high school. Currently, Fernando is looking to delve more into the software side of robotics using mapping, localization, and navigation algorithms for control. |
 |
Zlata BobyrOriginally from a small Siberian town of Russia, Zlata Bobyr is a rising freshman at Princeton University (class of 2023). She is interested in a wide array of fields revolving around Data Science, Machine Learning, User Experience, Artificial Intelligence, and Statistical Research. She is always open and excited for opportunities to experience new professional and academic endeavors. |
Former Members
Wayne Li, M.S. 2018 ECE-SRIP graduate researcher.
Alexander Guthrie, B.S. 2018 summer volunteer, 2018-2019 undergraduate researcher.
Ryan Lin, B.S. 2018 ECE 199 spring student, 2018 ECE-SRIP student, 2018-2019 undergraduate researcher.
Richard C. Wolcott Jr. 2018 summer volunteer, 2018-2019 undergraduate researcher.
Shemaiah Barton, B.S. 2018 summer volunteer, undergraduate researcher.
Brittany Nguyen. 2018 ECE 199 winter student, 2018 ECE-SRIP undergraduate researcher.
Samarth Aggarwal. 2018-2019 undergraduate researcher.
Steven Natalius, B.S. 2018-2019 undergraduate researcher.
Joey Gronovius, B.S. 2018 ECE 199 spring student, 2018 ECE-SRIP undergraduate researcher.
Nathan J. Mansur, B.S. 2018-2019 undergraduate researcher.
Christian Benitez, B.S. 2018 ECE 199 spring student, 2018 ECE-SRIP undergraduate researcher.
Michelle Mueller. 2018 summer volunteer undergraduate researcher.
Want to Join?

For more information on how to join our lab, email us at: smartwheelchair@eng.ucsd.edu
Become A Sponsor
We are asking for any sized donation to help fund our project. We are very excited and dedicated to designing a system that will truly meet the needs of people who have compromised mobility to live a more independent lifestyle.
Our team is looking for generous support for parts, power wheelchairs, cameras, or other sensors. If you are inclined to donate any type of materials or give an academic discount please fill out the Donation Form linked below and contact us at our email.
Email: smartwheelchair@eng.ucsd.edu
Link: Donation Form
{kind=link}
Thanks To Our Sponsors
 |
 |
|---|---|
 |
 |
 |
 |
 |
User Research
CHI 2019The User Research team were recommended to make a submission into CHI thanks to their work for ECE-SRIP 2018. With this in mind, the team made their first ever submission and were accepted. Their work is displayed in the ACM Digital Library and is linked to bellow. Check out our accepted CHI submission! Want to look over our final CHI presentation? You can find it here. |
 |
|---|
Third Place Medal

SRC Winners
List of names of Student Research Competition winners in the Undergraduate division.

Final Poster

Embedded Systems

|
Coding our SafetyThis summer the Embedded Systems team has the important goal of making our prototype safe enough for user testing. For our team to accomplish this tremendous task we have considered the following safety measures in our code: 1. Emergency Stop Button 2. Watchdog Timer 3. Sensor Edge-case regulation These elements are meant to protect the user in case of a malfunction in our setup both hardware and software wise. An Emergency StopThe Emergency Stop Button gives the user the ultimate fail-safe mechanism to override the system and stop the chair. |
|---|---|
Watchdogs are looking over our Code!A Watchdog Timer has the function of reseting the system when there is a stall in the main loop of the program. You can learn more about Watchdog Timers on Mbed here. We have implemented this to restart the system upon any mishaps during the any of the main code’s processes cause by, for example, hardware issues like a noise spike on the power supply, which occasionally occur. Strange behavior: edge-casesTo protect the movement of our wheelchair prototype from sensor malfunctions we are taking a look into the edge-cases of our different sensors. We want to make sure that we do not have false positives or false negatives to protect our user. Building comprehensive edge-case scenarios for our ToF and IMUs is currently in the plan of the Embedded Systems team. Take a look at some of our code on Github! |
 |
SmartWheelchair
Events
Spring 2019 BBQ
One of our signature Brazilian BBQ celebrations!
2019 CHI Conference
Our User Research team at the CHI conference in Glasgow.
UCSD FMP Research Symposium 2018
Alexander Guthrie and Dr. Silberman.
UCSD FMP Research Symposium Poster
2018 ECE Homecoming
Students from our lab presented at ECE Homecoming.